|
<![if !vml]> |
発行:2015/5/29 |
|
78回転SPレコード用ストロボスコープの製作 |
 <![endif]>
<![endif]>安価なプレーヤでSPレコードを聴こう
|
序論 SPレコードを電気的に再生するには78回転のレコードプレーヤーが必要です。 78回転の付いたプレーヤは現在も一部販売はされているようであるが、結構な値段である。 そこで、LO-D(日立製)のDCモーター仕様のセミオートプレーヤを購入し、これを改造することにした。 更にターンテーブル外周に刻まれている45回転用ストロボスコープを使ってPICマイコンでLEDを点滅させてやることで78回転に調整出来るようにした。 プレーヤ本体の改造 まずは33回転と45回転しかないプレーヤに78回転を追加します。 改造は自己責任で行なってください。 回転数切り替え用ロータリSWを3接点の物に交換し、33/45/78回転の切り替えをします。 接点数は2回路の物が必要です(後述) 回転数の改造は、プレーヤ毎に異なるので、詳細は割愛しますが、概ね以下の方法で可能と思います。 45回転モードで微調整VRを(+)側一杯に廻し切っても、78回転までは上がりません。そこで大元の調整VRを探します。 微調整VRからロータリSWの切り替え信号ラインを辿り、半固定抵抗器とそれに繋がっている抵抗を探します。 それらしいVRが見つかったらば、現在の位置をに印を付けておいてから、試しにその半固定抵抗を少し廻してみてください。回転数が変化すれば、正解です。 そこに、もう1回路78回転用に可変抵抗器と固定抵抗を追加すれば、改造完了です。 面倒な方は45回転、又は33回転のどちらかを潰し78回転専用としても構いません。 ストロボスコープをインターネットからダウンロードし、印刷し、微調整VRが中央付近で、同期が取れるように 固定抵抗器を交換しながら可変抵抗器を調整します。 これで完成ですが、78回転だと、スピードが頻繁に変化します。 ストロボスコープの改造 ストロボスコープをターンテーブルに載せるのも面倒なので、外周に刻まれているストロボ(当然33回転用と45用しかありません)で、東京では未使用の45回転60Hz用のところで、同調を見られるようにしました。 通常ストロボは50Hz/60Hzのけ蛍光灯、又はプレーヤ内臓ランプで見たときに、ストロボが止まって見えるように回転調整VRを調整します。 今回78回転を検出する為PICでLEDを高速に点滅させ、蛍光灯の代わりにこれで見ることにより60Hz用のスコープが78回転用に様変わりする訳です。 ストロボスコープの動作原理
1,※2:ストロボスコープは白、黒で1周期なので;各毎秒スピードを100倍した数がパターン数となる。 つまり33_1/3→1.8018回転×50Hz時=50×2=100倍=黒白各180ケ 同様に45rpm→黒白各133ケ、78rpm→黒白各77ケと言う計算式で求まります。 実際にターンテーブルのストロボの数を数えたところ、上記の通りでした。 ストロボパターン数は変えられませんから、これを一定とした時に、各回転数に同期したパターンとして見る為には50Hz/60Hz固定のストロボに照射する周波数を替えてやればよい事になります。 例えば33回転60用スコープで78回転を見るにはストロボ周波数は216÷0.7692=280.8Hzでストロボを発光すれば良い。 同様に45回転50Hz用スコープで78回転を見るにはストロボ周波数は133÷0.7692=172.90691Hz(5.7834msec)でストロボを発光すれば良い。 これをPICマイコン(16F84A)に12.8MHzの水晶を付けてポートに付けたLEDを上記計算で求まった周波数で点滅(実際には早くて点きっぱなしのように見えます)させます。 最終的には33-45-78と切り替えた時には33-45回転時は従来通り50Hz(100Hz)のパルスを照射し 78回転に切り替えた時は、現在使用していない45回転60Hz用スコープで78回転を検出します。 この場合の必要なストロボ周波数は160÷0.766675=208.69338Hz(4.7917msec)となります。 必要な周波数パルスを発生させる為にPICのTMR0を使用し定期的な割り込みパルスから作成します。 基本クロックは12.8MHzとしたので1サイクル=1/12.8MHz=0.078125usec、1命令は4サイクル掛かるので、4倍し0.3125usec掛かります。 フリーラン時のTMR0はFF=256回×0.3125usec=80usec、これで内部プリスケーラで256分周すると (0.3125usec×256=80usec)×256=20480usec=20.48msec毎に割り込み発生→1周期=40.96msec=24.414Hz ?33RPM-45RPM時は100Hzで発振させる (理想値は=0.3125usec×?=19.53125usec)×256=5000usec=5msec=毎に割り込み発生→1周期=10msec=100Hz 実際は(0.3125usec×63=19.6875usec)×256=5040usec=5.040msec=毎に割り込み発生→1周期=10.080msec=99.20634Hz TMR0設定値は63→(256=FFh)-(63=3Fh)=C2h=100Hz(実測100.7Hz)となりました。 ?78.26rpm時は45rpm-60Hzストロボを使用した場合...208.69333Hz(4.7917msec) 理想値は=(0.3125usec×?=9.35882792968usec)×256=22395.85995usec=2.39585995msec=毎に割り込み発生=4.7917msec=208.69333Hz 実際は(0.3125usec×30=9.375usec)×256=2400usec=2.400msec=毎に割り込み発生=4.800msec=208.3333Hz TMR0設定値は(256=FFh)-(30=1Eh)=E2h=208.3333Hz(実測208.0〜208.1Hz)となりました。 <![if !supportLists]>? <![endif]>?のモード切り替えはRA2ポートのHi/Loで切り替えます。"Hi"で100Hz/"Lo"で208Hzパルスが発生し、RB4〜RB7に接続したLEDを点滅させます。 回路説明 回路自体、特に難しいところはありません。基準水晶に12.8MHzの水晶を使用します。 高い精度を望むのであれば、TCXO等の発振モジュールを使用ください。 RS2ポートに付ける回転数切り替えSWは、今回3接点に交換したロータリSWの2回路目を使用します。 33回転・45回転の時は、OPEN(RAはHi)/78回転の時だけGNDとショート(RAはLo)となるように配線します。 また、元々付いていたランプを取り外して、LEDに取り替えます。 PICマイコン(16F84)は手持ちがあったので使用しただけで、この程度の回路構成だと、12F675辺りの8Pinマイコンでも十分です。 |
|||||||||||||||||||||
|
PICプログラム |
|||||||||||||||||||||
|
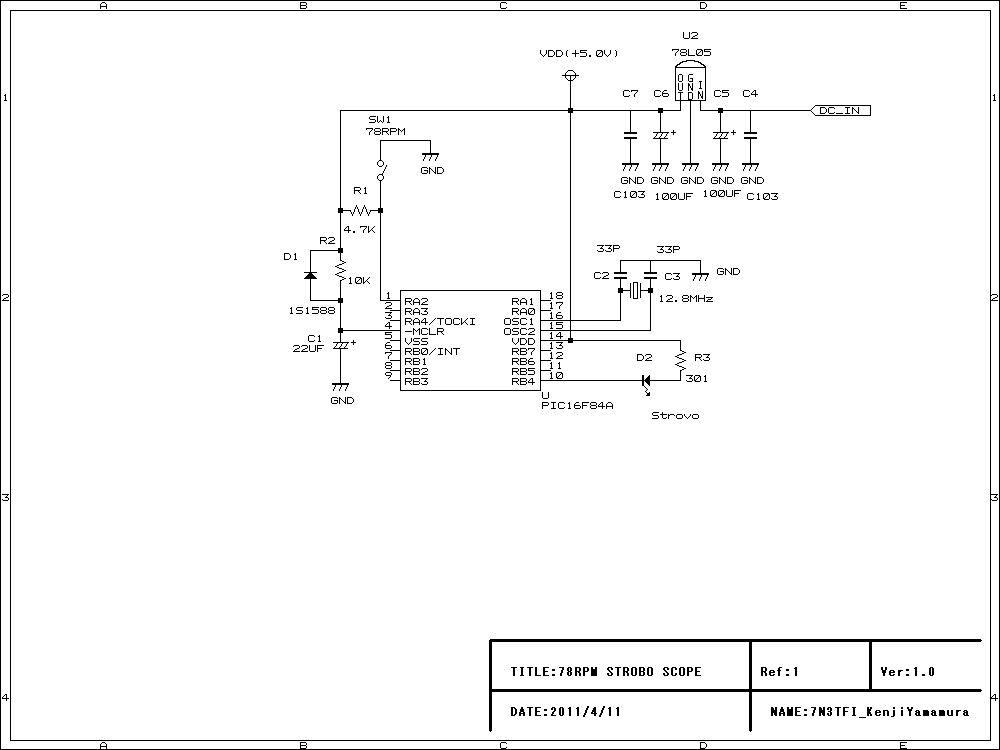
回路図 |
|||||||||||||||||||||
|
Copyright (C) 2017 7N3TFI All Rights Reserved. |
![]()